Particle Filter State Estimation
How the Particle Filter Works
A particle filter estimates quantities we cannot measure directly. Instead of tracking a single guess, it tracks many possible guesses in parallel. Each guess is a particle.
In this battery example, each particle represents a possible internal battery condition. As new voltage measurements arrive, the filter gives more weight to particles that better match observed data.
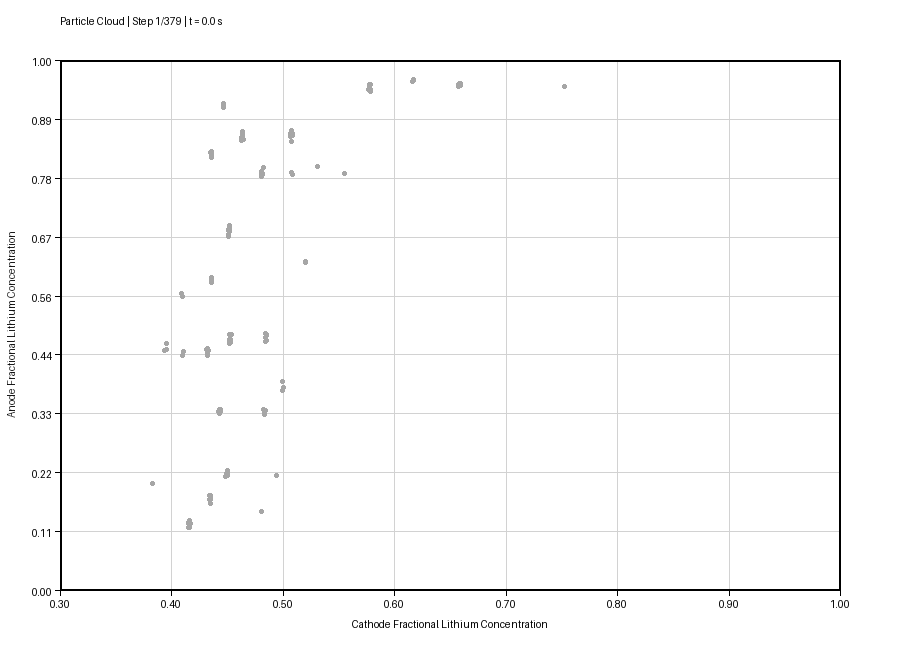
What You Are Seeing in the Animation
- Start with a cloud of possible battery states (many dots).
- Compare each dot to the latest sensor measurement.
- Give more weight to dots that match better.
- Resample so strong candidates appear more often.
- Move all dots forward in time and repeat.
Important: this demo visualizes only 2 tracked quantities
(x-axis and y-axis). The production model tracks
5 internal states.
Demo Media
Particle cloud animation (2D visualization of a higher-dimensional estimator).